

Case study
Πρόσφατα παρατηρήθηκε ένα περιστατικό όπου ο χειριστής διαπίστωσε την ανεξέλεγτη κάθοδο του σκάφους του (Mavic 2 Zoom) προς τη θάλασσα.
Ευτυχώς την τελευταία στιγμή κατάφερε να σώσει το σκάφος του. Ετσι είχαμε την ευκαιρία να αναλύσουμε τα δεδομένα από την μνήμη του Mavic και σας παρουσιάζουμε το πόρισμα.
Γιατί η γνώση είναι δύναμη!
Μετά την άδεια του Χρήστου, iδού η ιστορία, όπως τη διηγείται το flight log:
1) Πετάει ανέμελα και χαλαρά σε ύψος 5-10 μέτρα και παρόμοια απόσταση.

2) Μετά απο 11 λεπτά σηκώνει το σκάφος κάθετα στα 40 μ. σε Sport mode
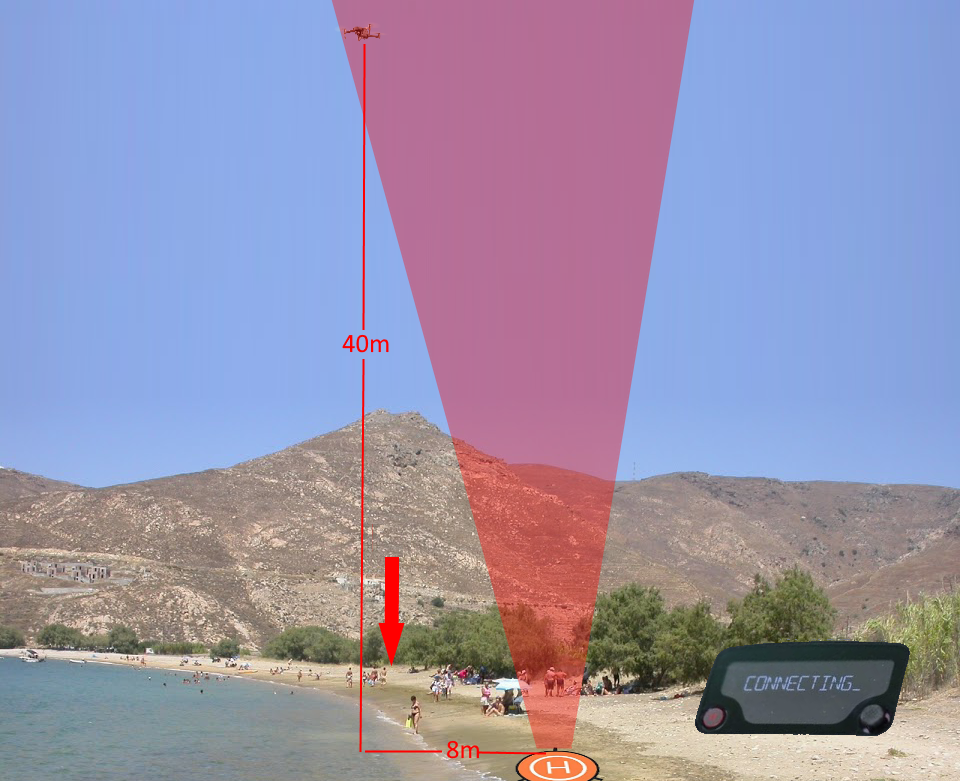
3) Εκεί, χάνει το σήμα γιατί είναι στη νεκρή ζώνη όπου το remote control δεν πιάνει. Μετά από 5 δευτερόλεπτα, ενεργοποιείται το Return to Home, αλλά από τη στιγμή που το σκάφος βρίσκεται σε λιγότερα από 20 μ. απόσταση από το Home Point, ξεκινάει Auto Land.

4) Για 32 δευτερόλεπτα το remote control δεν έχει σύνδεση και το σκάφος φτάνει στο 1,5 μ. από τη θάλασσα και ενεργοποιούνται οι κάτω αισθητήρες οι οποίοι διαβάζουν τη θάλασσα και δίνουν εντολή αποφυγής στα μοτέρ, τα οποία προσπαθούν να ανεβάσουν το σκάφος.

5) Πάνω από τη θάλασσα όμως, υπάρχει ένα στρώμα θερμού αέρα γιατί την ώρα αυτή (απόγευμα) η θάλασσα είναι πιο ζεστή και ένα στρώμα θερμότερου αέρα είναι πάνω απο την επιφάνειά της. Ο θερμός αέρας είναι και πιο αραιός και τα μοτέρ πρέπει να περιστραφούν με μεγαλύτερη ταχύτητα για να μείνει το σκάφος στο ίδιο σημείο.
6) Τα μοτέρ όμως έχουν φτάσει στο μέγιστο και δεν έχουν άλλη δύναμη, με αποτέλεσμα το σκάφος σιγά-σιγά χάνει ύψος.
Συμπεράσματα:
Ευτυχώς την τελευταία στιγμή κατάφερε να σώσει το σκάφος του. Ετσι είχαμε την ευκαιρία να αναλύσουμε τα δεδομένα από την μνήμη του Mavic και σας παρουσιάζουμε το πόρισμα.
Γιατί η γνώση είναι δύναμη!
Μετά την άδεια του Χρήστου, iδού η ιστορία, όπως τη διηγείται το flight log:
1) Πετάει ανέμελα και χαλαρά σε ύψος 5-10 μέτρα και παρόμοια απόσταση.
2) Μετά απο 11 λεπτά σηκώνει το σκάφος κάθετα στα 40 μ. σε Sport mode

3) Εκεί, χάνει το σήμα γιατί είναι στη νεκρή ζώνη όπου το remote control δεν πιάνει. Μετά από 5 δευτερόλεπτα, ενεργοποιείται το Return to Home, αλλά από τη στιγμή που το σκάφος βρίσκεται σε λιγότερα από 20 μ. απόσταση από το Home Point, ξεκινάει Auto Land.

4) Για 32 δευτερόλεπτα το remote control δεν έχει σύνδεση και το σκάφος φτάνει στο 1,5 μ. από τη θάλασσα και ενεργοποιούνται οι κάτω αισθητήρες οι οποίοι διαβάζουν τη θάλασσα και δίνουν εντολή αποφυγής στα μοτέρ, τα οποία προσπαθούν να ανεβάσουν το σκάφος.

5) Πάνω από τη θάλασσα όμως, υπάρχει ένα στρώμα θερμού αέρα γιατί την ώρα αυτή (απόγευμα) η θάλασσα είναι πιο ζεστή και ένα στρώμα θερμότερου αέρα είναι πάνω απο την επιφάνειά της. Ο θερμός αέρας είναι και πιο αραιός και τα μοτέρ πρέπει να περιστραφούν με μεγαλύτερη ταχύτητα για να μείνει το σκάφος στο ίδιο σημείο.

6) Τα μοτέρ όμως έχουν φτάσει στο μέγιστο και δεν έχουν άλλη δύναμη, με αποτέλεσμα το σκάφος σιγά-σιγά χάνει ύψος.
Τελικά ο Χρήστος βλέποντας το τέλος να πλησιάζει, πέφτει στη θάλασσα και αρπάζει το Mavic λίγα εκατοστά πριν ακουμπήσει στο νερό!
Συμπεράσματα:
- Φροντίζουμε το σκάφος να μη φτασει λιγότερο από 3 μέτρα απο την επιφάνεια της θάλασσας.
- Απογειωνόμαστε σε μεγαλύτερη απόσταση από 20 μέτρα, ώστε αν το σκάφος χρειαστεί να κάνει Return to Home, να έρθει σ'εμάς και να μην κάνει Autoland, πέφτοντας στην θάλασσα.