

Calibration: Ποιό, Πότε, Γιατί και Πώς;
"Calibration".
Ίσως η λέξη που έχει χρησιμοποιηθεί περισσότερο από ποτέ από τους χρήστες των drones και μοιραία ο πιο παρεξηγημένος
από όλους τους όρους.
Ίσως γι’αυτό να ευθύνεται το γεγονός ότι δεν υπάρχει ένα, αλλά πέντε συνολικά calibrations.
Κατ’αρχήν τι σημαίνει «calibration». Στα ελληνικά σημαίνει «βαθμονόμηση» και -κάπως απλοποιημένα- είναι η διαδικασία με την οποία επαναφέρουμε ένα όργανο μέτρησης στις αρχικές συνθήκες.
Ποια είναι λοιπόν τα calibrations ενός dji drone.
Compass Calibration (Βαθμονόμηση Πυξίδας): Το πιο γνωστό ίσως calibration που έχει γίνει αντικείμενο πολλών παρεξηγήσεων. Σοφοί γέροντες, λένε ότι διορθώνει κάθε πρόβλημα πτήσης, ενώ στα μυστικά κείμενα του Βουδισμού αναφέρεται ότι η παράλειψη να το κάνεις πριν την απογείωση ισοδυναμεί με ισόβιο κακό κάρμα !
Τί είναι: Το κάθε σκάφος διαθέτει ένα (ή δύο) μαγνητόμετρα (πυξίδες), τα οποία μετρούν τις μικρές διαφορές του μαγνητικού πεδίου σε κάθε κατεύθυνση. Με βάση την ισχύ του πεδίου προσδιορίζει που βρίσκεται ο μαγνητικός Βορράς και άρα γνωρίζει την κατεύθυνση προς την οποία είναι στραμμένο το σκάφος.
Πότε το κάνουμε: Μόνο όταν μας το ζητήσει η εφαρμογή και πάντα στο σημείο που πρόκειται να απογειωθούμε. Αν το ζητήσει, ελέγχουμε γύρω μας αν βρίσκονται μεταλλικά αντικείμενα (πχ. αυτοκίνητα, μεταλλικές κατασκευές, καλώδια υψηλής τάσης κλπ). Αν βρίσκονται τέτοια αντικείμενα, απομακρυνόμαστε από το σημείο. Αν και αφού απομακρυνθούμε, το μήνυμα για compass calibration παραμένει, τότε το κάνουμε.

Γιατί το κάνουμε: Ο λόγος που κάνουμε compass calibration, είναι για να «μάθει» το σκάφος, ότι σε αυτή την τοποθεσία, υπάρχουν κάποιες μαγνητικές ανωμαλίες, ώστε να τις λάβει υπόψη του στον υπολογισμό της θέσης του σε σχέση με το Βορρά.
Ο λόγος που αποφεύγουμε να κάνουμε calibration σε περιβάλλον με μαγνητικά πεδία, ή μεταλλικά αντικείμενα στο σημείο απογείωσης, είναι ότι θα «μάθουμε» στην πυξίδα να θεωρεί φυσιολογικές αυτές τις μαγνητικές ανωμαλίες. Αυτό σημαίνει ότι, όταν θα απογειωθούμε με το καλό και απομακρυνθούμε από τα επίμαχα σημεία, τότε η πυξίδα θα θεωρεί λανθασμένα τα δεδομένα που λαμβάνει, ακόμα και αν αυτά είναι φυσιολογικά.
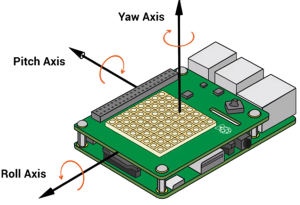
IMU Calibration: Ο όρος αυτός είναι ίσως ο πιο άγνωστος εν μέσω των χρηστών και είναι ίσως αυτός που ξεχωρίζει τους κατόχους από τους χειριστές. Η αποτυχία λειτουργίας της μονάδας IMU είναι, παρόμοια με το σύμπτωμα που βιώνετε, όταν έχετε πιεί όλο το Βόσπορο και ο ευγενέστατος τροχαίος σας καλεί να περπατήσετε ακολουθώντας τη γραμμή.
Τί είναι: Η IMU (Inertia Measurement Unit= Μονάδα Μέτρησης Αδράνειας) βρίσκεται στο κέντρο βάρους του σκάφους και διαθέτει (ένα ή δύο) σετ από γυροσκόπια και επιταχυνσιόμετρα. Η λειτουργία του είναι παρόμοια με το όργανο ισορροπίας που βρίσκεται στο εσωτερικό του αυτιού μας και μας επιτρέπει να γνωρίζουμε αν το κεφάλι μας βρίσκεται σε κλίση, ή αν κινούμαστε. Αυτή η πληροφορία που έρχεται από την IMU, οδηγείται προς τα ESC (οι μονάδες που τροφοδοτούν τα μοτέρ του σκάφους) τα οποία αυξομειώνουν τις στροφές του κάθε μοτέρ ξεχωριστά, ώστε το σκάφος να διατηρείται οριζόντιο.
 Γιατί το κάνουμε. Θεωρητικά, IMU Calibration θα
έπρεπε να κάνουμε όταν μας το ζητήσει η εφαρμογή. Όμως κάτι τέτοιο, πολύ σπάνια
συμβαίνει, και εδώ θεωρούμε ότι είναι μία παράλειψη της dji. Δεδομένου ότι η IMU είναι μια
πολύ κρίσιμη μονάδα για τη συμπεριφορά του σκάφους στον αέρα, δεν θα έπρεπε
να επιτρέπονται έστω και μικρές αποκλίσεις στην ευθυγράμμιση των γυροσκοπίων και
την κίνηση των επιταχυνσιομέτρων.
Γιατί το κάνουμε. Θεωρητικά, IMU Calibration θα
έπρεπε να κάνουμε όταν μας το ζητήσει η εφαρμογή. Όμως κάτι τέτοιο, πολύ σπάνια
συμβαίνει, και εδώ θεωρούμε ότι είναι μία παράλειψη της dji. Δεδομένου ότι η IMU είναι μια
πολύ κρίσιμη μονάδα για τη συμπεριφορά του σκάφους στον αέρα, δεν θα έπρεπε
να επιτρέπονται έστω και μικρές αποκλίσεις στην ευθυγράμμιση των γυροσκοπίων και
την κίνηση των επιταχυνσιομέτρων.
Αυτό που χρειάζεται κάποιος για να κάνει IMU Calibration, είναι μόνο μία
επίπεδη οριζόντια επιφάνεια και τίποτε άλλο. Δεν έχει καμία σημασία αν είναι
μεταλλική, αν είναι μέσα ή έξω, ζέστη ή κρύο, μέρα ή νύχτα, ούτε αν ο χειριστής
έχει φάει σκόρδο ή παστουρμά. Σημαντική λεπτομέρεια όμως, είναι να έχει
λιγότερο από 0,3% αλκοόλ στο αίμα του. Επαναλαμβάνουμε, μην αμελείτε να κάνετε συχνά
IMU Calibration. Μια μικρή
πρόσκρουση, μία απρόσεκτη μεταφορά του σκάφους, είναι ικανά να απορυθμίσουν την
IMU και
όταν το σκάφος βρεθεί στον αέρα, η συμπεριφορά του να είναι παρόμοια με του
Ορέστη Μακρή στην ταινία «Ο Μεθύστακας».

Vision calibration: Αν σε ένα post γράφει κάποιος «Τι είναι αυτό ρε παιδιά που μου βγάζει η εφαρμογή;» τότε, κατά 90% η φωτογραφία από κάτω δείχνει αυτό.

Τι είναι: To μήνυμα αυτό μας ενημερώνει ότι έχει πρόβλημα κάποιος από τους αισθητήρες αποφυγής εμποδίων. Στην πραγματικότητα αυτοί οι αισθητήρες είναι μικρές κάμερες που εντοπίζουν εμπόδια που βρίσκονται κοντά στο σκάφος. Στις περισσότερες περιπτώσεις οι κάμερες αυτές βρίσκονται σε ζεύγος, ώστε -όπως τα μάτια μας- να υπολογίζουν την απόσταση από το εμπόδιο.
Γιατί το κάνουμε. Σε κάποιες περιπτώσεις, όπως για παράδειγμα μετά από κάποια πρόσκρουση, η εστίαση των καμερών μπορεί να παρουσιάσει μικρή απόκλιση και να μην ευθυγραμμίζεται η θέση τους. Κάτι σαν τον Αυλωνίτη στη «Σωφερίνα». Τότε πρέπει να κάνουμε μία διαδικασία ευθυγράμμισης των καμερών, ώστε ο εντοπισμός και η αποφυγή εμποδίων να είναι αποτελεσματική.
Όπως εύκολα καταλαβαίνει κάποιος, η λειτουργία των
αισθητήρων αποφυγής εμποδίων δεν είναι κρίσιμη για τη λειτουργία του σκάφους,
αλλά φυσικά το προστατεύουν από συγκρούσεις με εμπόδια. Επίσης να σημειώσουμε
ότι μήνυμα σφάλματος για τους αισθητήρες εμποδίων, μπορεί να εμφανιστεί όταν ο
φωτισμός είναι χαμηλός, ή όταν πέσει πάνω τους απευθείας ηλιακό φως (κυρίως τις
πρωινές και απογευματινές ώρες, όταν ο ήλιος είναι χαμηλά στον ορίζοντα).

Gimbal Calibration: Το σκάφος κινείται, αλλάζει κατεύθυνση, πλαγιάζει, βουτάει, το χτυπούν ριπές αέρα, αλλά η λήψη της κάμερας είναι σταθερή. Γι’αυτή τη σταθερότητα υπεύθυνο είναι το gimbal, το οποίο φροντίζει να αντισταθμίζει τις κινήσεις του drone, κρατώντας την κάμερα στο ίδιο επίπεδο σε σχέση με τον ορίζοντα, ενώ ταυτόχρονα εξομαλύνει τις απότομες κινήσεις.
Γιατί το κάνουμε: Το Gimbal calibration το χρησιμοποιούμε για να επαναφέρουμε το gimbal στην αρχική του κατάσταση, αν τυχόν παρατηρούμε αποκλίσεις στην ευθυγράμμιση του ορίζοντα, η κάποιο μήνυμα σφάλματος που αφορά το gimbal.
Tip: Πριν το gimbal calibration, κάνουμε IMU calibration, γιατί IMU και gimbal είναι αλληλένδετα μεταξύ τους, αφού ανταλλάσσουν πληροφορίες σχετικά με τη θέση και την κίνηση του σκάφους.
 Remote Control Calibration:
Κρατήσαμε για το τέλος, το calibration του χειριστηρίου. Αν και δεν αφορά το ίδιο το σκάφος, το χειριστήριο είναι ο σύνδεσμος μεταξύ χειριστή και σκάφους οπότε σίγουρα αξίζει την προσοχή μας.
Remote Control Calibration:
Κρατήσαμε για το τέλος, το calibration του χειριστηρίου. Αν και δεν αφορά το ίδιο το σκάφος, το χειριστήριο είναι ο σύνδεσμος μεταξύ χειριστή και σκάφους οπότε σίγουρα αξίζει την προσοχή μας.
Γιατί το κάνουμε: Το κάνουμε για να επανακαθορίσουμε το σημείο ηρεμίας των μοχλών χειρισμού. Αν οι μοχλοί δεν είναι κεντραρισμένοι, τότε το remote control μας προειδοποιεί με επαναλαμβανόμενο βόμβο, ενώ στα control με οθόνη LCD, εμφανίζεται και το μήνυμα "Stick Err".
Όταν μπουμε στο remote control calibration μέσα από την εφαρμογή, αυτό που μας ενδιαφέρει είναι, όταν οι μοχλοί βρίσκονται στο κέντρο, η εικόνα στην οθόνη, θα πρέπει να είναι αυτή:
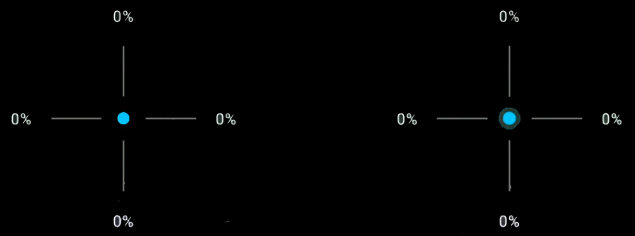
Δηλαδή προς κάθε κατεύθυνση το ποσοστό της διαδρομής θα πρέπει να είναι 0%. Αυτό σημαίνει ότι όταν έχουμε το drone στον αέρα και δεν κινούμε κάποιο μοχλό, τότε αυτό θα μένει ακίνητο.
Η επόμενη κίνηση είναι να βεβαιωθούμε ότι όταν κινήσουμε το μοχλό προς προς μία μόνο κατευθυνση, τότε θα πρέπει να δούμε αυξομείωση των ποσοστών της διαδρομής, μόνο στην κατεύθυνση που το κινούμε και σε καμία, άλλη.
Τέλος εκτελούμε το calibration και είμαστε έτοιμοι να χρησημοποιήσουμε το remote control και πάλι.
Tip: To Remote Control calibration γίνεται με το σκάφος σβηστό.